Intraoperative Navigation
We developed methods including online fine-tuning, texture-invariant feature alignment, and occlusion-aware spatial propagation models, achieving robust estimation of endoscope trajectory and real-time tracking of flexible instruments in complex endoluminal environments.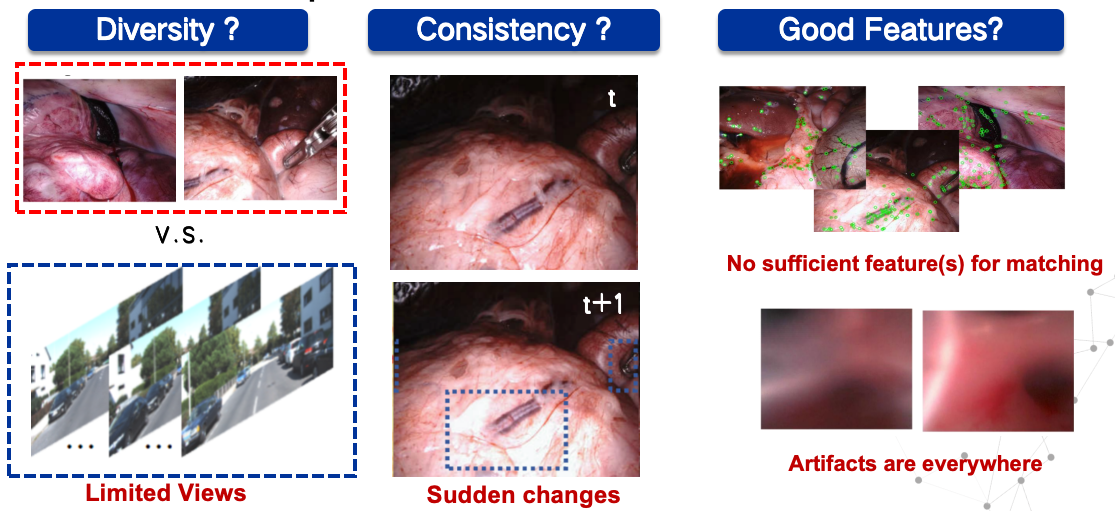
Related Papers
- J. Wu, Y. Gu, G.-Z. Yang, Trimming-then-Augmentation: Towards Robust Depth and Odometry Estimation for Endoscopic Images, Medical Image Analysis (MedIA), 2026 — code
- J. Wu, Yimin Chu, Haixia Peng, Y. Gu, G.-Z. Yang, R2Nav: Robust, Real-time Test Time Adaptation for Robot Assisted Endoluminal Navigation, IROS, 2025 — code
- J. Wu, Y. Gu, G.-Z. Yang, Sim2Real within 5 Minutes: Efficient Domain Transfer with Stylized Gaussian Splatting for Endoscopic Images, ICRA, 2025
- H. Yue, Y. Gu, TCL: Triplet Consistent Learning for Odometry Estimation of Monocular Endoscope, MICCAI, 2023 — code
- J. Xu, T. Zhang, Y. Wu, J. Yang, G.-Z. Yang, Y. Gu, CDFI: Cross Domain Feature Interaction for Robust Bronchi Lumen Detection, ICRA, 2023
- Y. Gu, C. Gu, J. Yang, J. Sun, G.-Z. Yang, Vision-Kinematics-Interaction for Robotic-Assisted Bronchoscopy Navigation, IEEE Transactions on Medical Imaging (TMI), 2022
- J. Liu, Y. Qiao, J. Yang, G.-Z. Yang, Y. Gu, Discriminative Asymmetric Learning for Efficient Surgical Instrument Parsing, ICRA, 2021
- M. Shen, Y. Gu, N. Liu, G.-Z. Yang, Context-aware depth and pose estimation for bronchoscopic navigation, ICRA (with RAL submission), 2019
- Y. Gu, K. Vyas, J. Yang, G.-Z. Yang, Triplet Feature Learning on Endoscopic Video Manifold for Online GastroIntestinal Image Retargeting, MICCAI, 2019
- Y. Gu, Y. Hu, L. Zhang, J. Yang, G.-Z. Yang, Towards Occlusion-Aware Pose Estimation of Surgical Suturing Threads, IEEE Transactions on Biomedical Engineering (TBME), 2023