Preoperative Planning
We build the segmentation and dectection methods for endoluminal intervention.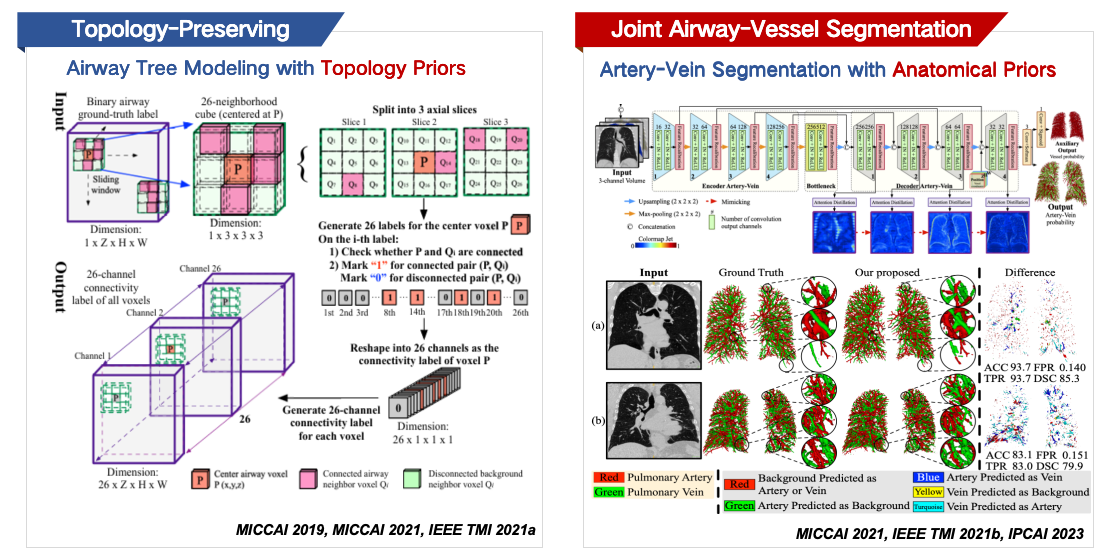
We build the segmentation and dectection methods for endoluminal intervention.
We developed methods including online fine-tuning, texture-invariant feature alignment, and occlusion-aware spatial propagation models, achieving robust estimation of endoscope trajectory and real-time tracking of flexible instruments in complex endoluminal environments.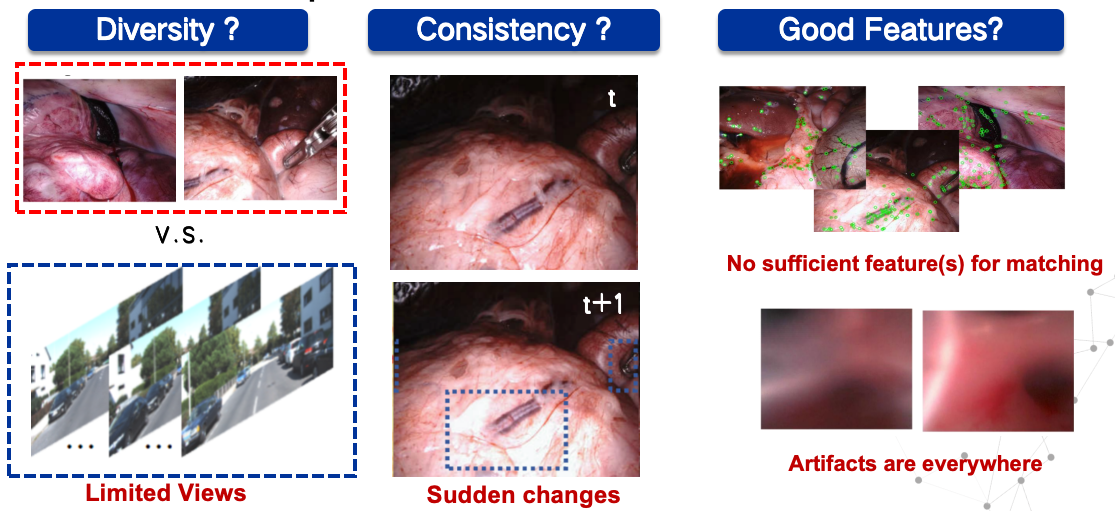
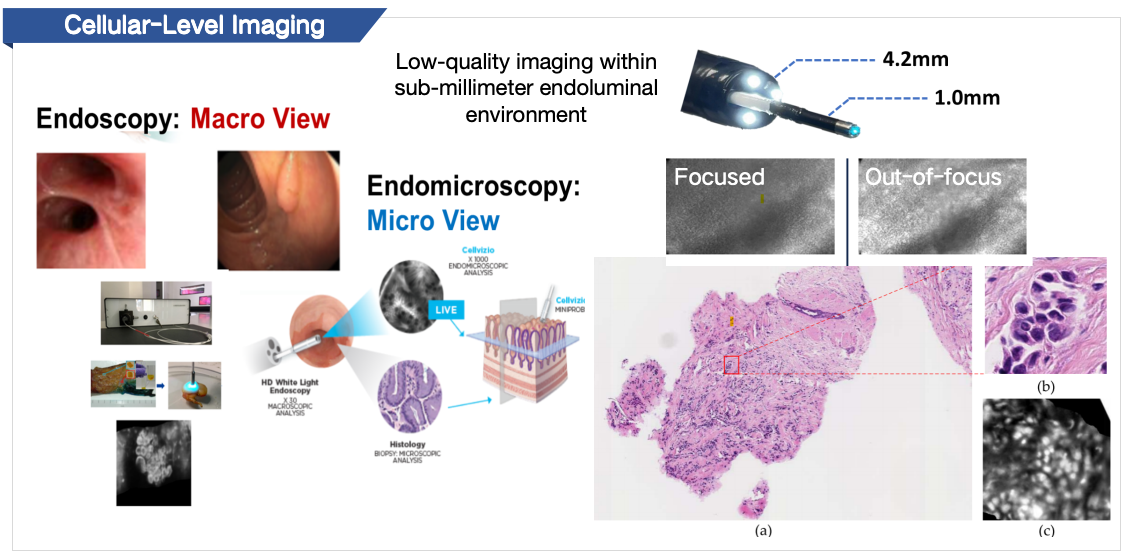
We proposed enhancement and diagnosis frameworks based on unsupervised multi-modal atlas mining and transfer cyclic feature learning. Developed methods including diversity-aware auto-focusing, kernel distillation focus, cross-modal virtual staining, achieving millisecond-level super-resolution imaging and in vivo pathological semantic transfer.